4008282552

装配仿真技术是在推进航空数字化背景下提出的,应用装配仿真技术能够在产品设计阶段消除潜在的装配缺陷,提前发现并解决装配过程中的各种问题。在产品装配过程中充分利用上游三维CAD数据,保持了飞机产品设计数据的一致性,实现工艺设计的继承性、规范性、标准化和最优化,进而缩短产品研制周期,降低研制成本,提高产品装配质量。
作者:张开富、程晖、骆彬;来源:引自《智能装配工艺与装备》,由「智造苑」原创首发,本文经授权发布。
一、装配仿真的相关概念与原理
定义1
数字化预装配是设计部门在数字化样机基础上进行的几何样机级的仿真,主要是针对飞机设计的合理性进行仿真。其主要目的是对装配的几何约束、干涉问题进行检验,验证飞机结构设计的协调性、合理性和可维护性,是产品设计工作的组成部分。
定义2
装配仿真是工艺部门在产品工艺模型(添加了工艺信息的产品数字模型)和装配资源模型的基础上进行的操作方法和工艺流程的仿真,也可以称为装配工艺过程仿真,其涵盖了从单个装配单元的装配过程、流程时间到生产线物流变化的整个产品的装配生产过程。装配过程仿真是一种更复杂、更接近真实的仿真。
定义3
沉浸式装配仿真是将装配过程仿真以沉浸的方式展示在人们眼前,使操作者仿佛身临其境,可以在虚拟的环境中分析产品的装配流程及其可行性与合理性,这种方式更便于各专业人员在一起讨论产品设计与装配方案。
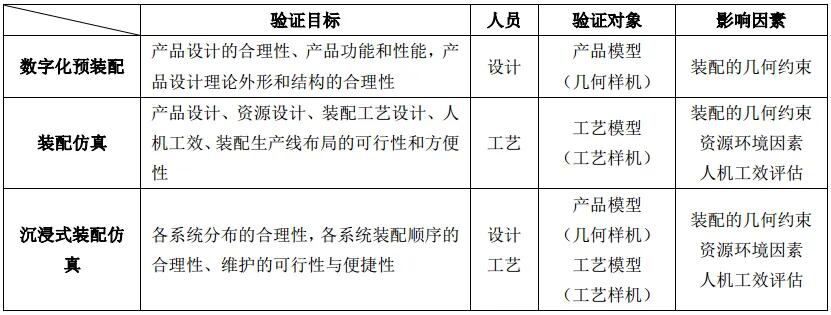
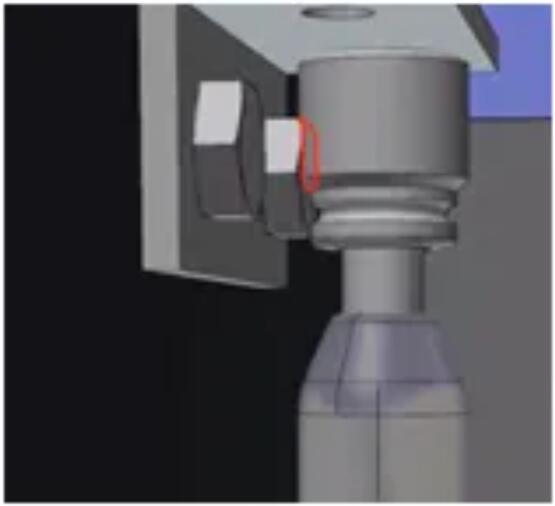
图1 装配干涉的仿真
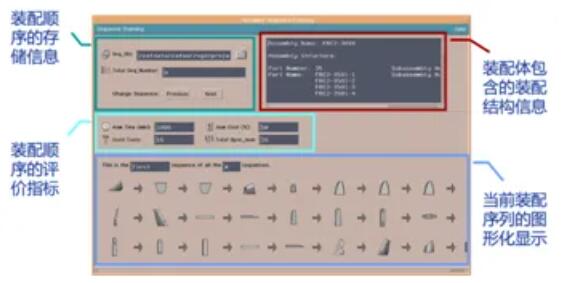
图2 装配顺序的仿真


图4 虚拟仿真交互环境

图5 惯性捕捉

图6 人机交互工具
数据衣为分体式结构,穿在现实人身体各部位,用于捕捉人体实际姿态,实现真实人与虚拟人的行为统一。数据衣每个部件上均设有反光标记球,将入射的红外辐射波反射到相反方向更狭窄的角度中。智能追踪摄像头视野能覆盖一定的空间范围,在该范围内可侦测到标记点上反射回来的红外辐射,并基于获取的红外辐射信号创建一个灰度图片。在整个过程中,摄像头根据模式识别的方式计算标记点的高精度二维坐标,坐标平均精度为0.04个像素,二维数据发回到控制主机,根据摄像头视野范围的共有部分,计算出红外射线交点的三维坐标,即为目标点的空间位置坐标。手部动作采用数据手套,其内部传感器可准确检测人手的精细动作,指导仿真软件中虚拟人完成相应动作。(本文完)

